


移动式旋臂起重机简介
移动式旋臂起重机是近年发展起来的中小型起重设备,可适用于短距离、密布性调运的场合,比其它常规性吊运设备,移动式悬臂吊具更灵活机动、结构简单、使用范围广、便捷等特点,是自动生产线上必备的单独应急吊装设备,有了它能确保生产线畅通无阻。
产品图片



移动式旋臂起重机主要组成结构
移动式旋臂起重机是由摆线针轮减速机,横梁旋转机构、立柱、操纵机构、底座、环链(或钢丝绳)电动葫芦、一对滚轮架、配重、四只主被动轮,以及电器设备等部件组成。
BZY型横梁的旋转是由人力推动横梁旋转,靠装在立柱顶端的两只滚针轴承和推力轴承作为支承来实现的,所以横梁转动较灵活;BZY-1型横梁的旋转是由双级摆线针轮减速机带动一对齿轮转动。顶部的连接板、横梁与减速机连成一体,通过安装在减速机转轴上的主动齿轮与固定在立柱顶部的被动齿轮之间的啮合而产生的相对运动。而带动横梁旋转。横梁转动中由相对对称的一对滚轮在立柱的滚道上滚动作为支承,因此较平稳。
- 操纵机构:起重机运行方向的控制是由转向机构来实现的,通过与轮架连成一体的操纵杆,按所需运行方向缓缓扳动操纵杆,从而改变运行方向。
- 运行机构:BZY型起重机的运行移动是由单级摆线针轮减速机直接带动主动轮行走,运行速度一般为15米/分,因轮子的大小不同,速度略有不同。BZY型起重机的运行机构则无减速机带动,而是靠人力推动起重机行走的。
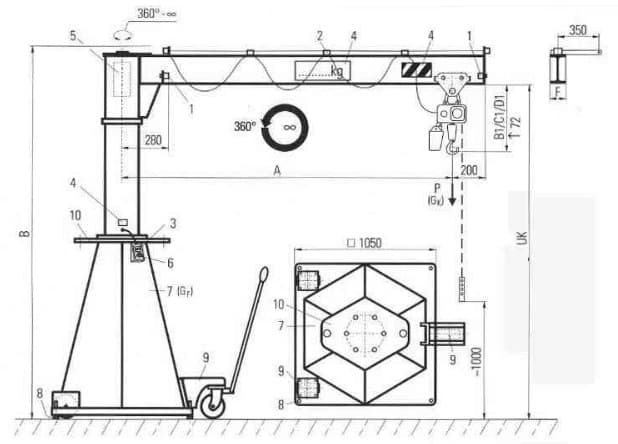
1.小车缓冲器;2.供电电缆;3.急停;4.标牌;5.导电滑环;6.电源插座:7.配重;8.调整螺栓:9.叉车移动架。
引用标准:
- GB3811 起重机设计规范
- JB/T8906 旋臂起重机
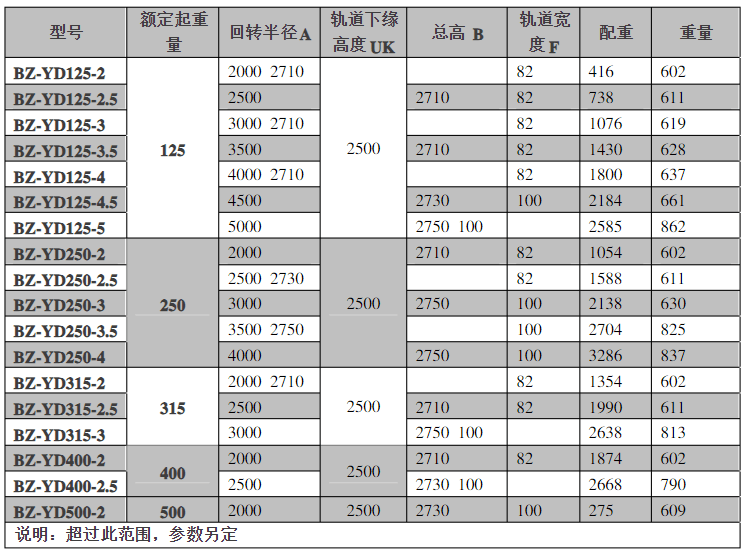
移动式旋臂起重机主要技术参数
移动式悬臂吊工作强度是轻型,更具灵活机动、适应性广,是自动生产线上必备的单独应急吊装设备,有了它能确保生产线畅通无阻,移动式悬臂吊起重量是125KG到500KG。
移动式悬臂吊产品特点
- 可根据现场需要变更使用场合;
- 采用多种移动方式,人力牵引、电动牵引或叉车移动,移动轻便,采用叉车移动时,可采用固定底座的方式;
- 立柱采用正六边棱台,底部通过四组螺杆调节立柱的垂直度;
- 电气设备,包括接插式插座、集电滑环、圆电缆及支撑管,当旋臂支架长度大于3m时,采用内置式滑车电缆导电;
- 悬挂小车采用手动运行小车或电动运行小车;
- 回转部分采用滚动轴承,手动回转;
- 内置式行走机构,采用带滚动轴承的特走轮,摩擦力小,行走轻快;
- 结构尺寸小,特别有利于提高吊钩行程;
- 具有、节能、省事、占地面积小,易于操作与维修等特点。
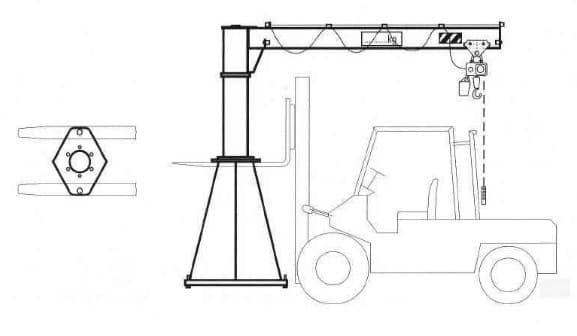
旋臂起重机移动方式
- 手动牵引(采用3轮小车)移位;
- 起重机起吊移位;
- 叉车移位,见下列示意图。
适用范围特征
移动式旋臂起重机,在300°的回转悬臂的一端上配置环链电动葫芦(或钢丝绳电动葫芦),用于对货物或工件的起吊作业:另一端设置配重,与起重臂相对同时回转,起平衡作用。广泛适用于厂矿、车间、野外,仓库小型设备安装。货物和工件装卸,以及建筑低矮不宜架设行车等场所。
BZY型移动式起重机可在任意方向运行所需地点,且电动葫芦可在悬臂上行走,适宜于重物需要行走、旋转的场合,重物的提升靠电动葫芦进行上下起降。该起重设备具有结构简单,操作方便,灵活、作业空间大,适用范围广等特征。
移动式悬臂吊安装:
(1)安装前,应根据装箱单对零部件和文件是否缺少和损失,有无损伤。
(一般在保管半年以上的转动机件需重新清洗干净后注入新油再安装。)
(2)安装时,应保持转臂水平与立柱垂直,不得倾斜。滚轮与滚道接触均匀,各转动机构转动灵活。
(3)回转臂的安装,首先将立柱顶端按图2装配好,然后将立柱与底座用螺栓联接后并校对垂直度,再将转臂吊顶部安装位置,校对水平拧紧螺栓,再装配配重和电动葫芦。
(4)接通电源,该机电源是通过安装在底座上的绕线装置中的集电环,引入安装在底座上的电气控制箱,然后通过电缆与安装在立柱顶部的集电环连接,电动葫芦上的电缆线连接。安装在底座下部的减速器的电源直接由电气控制箱引入。
旋臂起重机运转试验
- 起升试验
a. 空载试车:电动葫芦在横梁上起升和下降时,当停止在空中任一高度时,均不能有下滑现象并校准电动葫芦上升时的极限位置,核对限位开关位置的准确性。
b. 额定载荷试验:试机前应先打开四只活动支腿,拧动丝杆并且撑紧地面,然后方可进行额定载荷试验。在额定载荷的情况下,电动葫芦停在空间任一位置时,都不能有下滑现象,当电动 葫芦停在横梁外端(即回转半径)试吊10分钟,测其下挠度,不得大于L/125。卸货后不得留有塑性变形。 - 电动葫芦运行试验:电动葫芦在横梁上左右运行时应运行平稳,旋臂横梁回转时灵活平稳,不得有抖动现象,并应停止在任何位置上不致自行滑移,且外端应有L/125的上挠度。
- 起重机空载运行试验:运行试验前,应将四只活动支腿收拢靠近底座。起重机应在没有载荷的情况下做直线运行和改变方向的运行,运行时应平稳无噪声,并能准确的停止在需要的位置上。





