


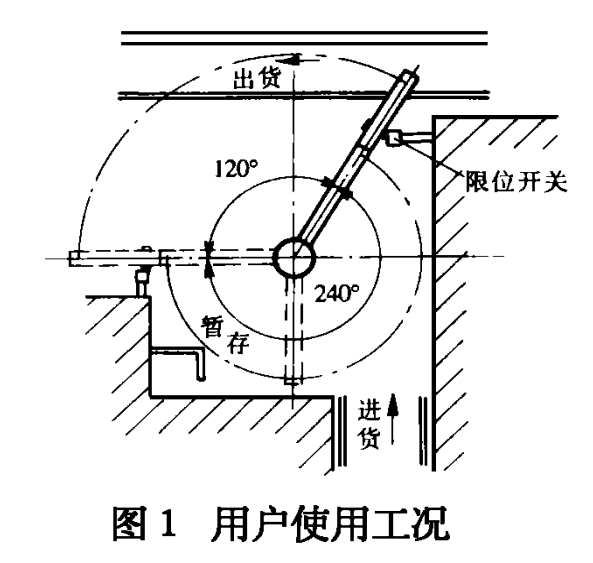
悬臂吊以占地面积小、投资少、使用灵活而得到广泛应用,其悬臂结构形式一般有整体悬臂式、曲臂式2种,但有些特殊工况尚需特殊设计。如某用户根据其车间建筑及工艺流程需要,在暂存库内设置一台起重量为1t的悬臂起重机。其电动旋转360°(见图1),在240°范围内用4.2m的短悬臂,其余120°范围内用长悬臂,悬臂总长7.5m。
伸缩悬臂吊的结构

图2所示的伸缩悬臂吊结构由立柱1、固定悬臂2、支撑滚轮3、伸缩臂驱动装置4、伸缩臂5、电动葫芦6等组成。其结构特点:
- 立柱1、固定悬臂2部分与整体悬臂式结构相同,但固定悬臂2下翼缘运行的是伸缩臂5的驱动装置4,而不是电动葫芦6。
- 在固定悬臂2下面设一用于支撑滚轮3行走的扁钢轨道1(见图3)。支撑滚轮3除可支撑伸缩臂外,还起伸缩臂运行导向的作用。

运行原理
在240°范围内时,伸缩臂缩进,电动葫芦运行。在120°范围内时,伸缩臂伸出(如图2)。主要作业是在收缩状态下吊起,旋转到120°范围内卸货。为防止伸缩臂的摆动,应合理控制支撑滚轮与轨道的侧向间隙(1~2mm),并调整好伸缩臂驱动装置运行轮缘的间隙,以限制伸缩臂的摆动。
辅助设施
为防止从120作业区的长悬臂状态旋转到240°作业区的短悬臂状态时悬臂碰到建筑物上,在建筑物的适当位置设置了限位开关(见图1)。限位开关的碰头设在伸缩臂上,在短悬臂状态时,限位开关不起作用。当有误操作(长悬臂进入短悬臂作业区)时,由于旋转速度较慢,限位开关即使旋转电机断电,停止悬臂转动,起到防碰的作用。